


团队研发了一款名为TianjicX的28nm神经拟态芯片。其峰值动态能效为3.2TOPS/W,片上存储带宽为5.12tb/s,单位面积算力高达0.2TOPS/mm2,支持对每个任务进行计算资源的自适应分配和执行时间的调度。TianjicX芯片能提高机器人在复杂和动态环境中处理多用途和多智能任务的能力。具体来说,弹性资源分配可以提高硬件利用率,满足机器人不同的性能要求。独立的执行上下文使机器人能够并发和异步地执行多个任务;支持任务之间的交互,可确保机器人的多个模块(即多模态感知和多运动模块的协调)顺利协作。
研究团队制作了一个配备有TianjicX芯片和多模态传感器的移动机器人Tianjicat(天机猫),并设计了由Tianjicat扮演猫的猫捉老鼠游戏。通过实现不同的神经网络和SNN模型,该机器人可以实时完成声音识别、声源定位、目标检测和识别、避障和决策等多项任务。研究团队打造了一个搭载该芯片的多智能任务移动机器人Tianjicat(天机猫),并设计让它作为猫这个角色,来参与猫捉老鼠的游戏。

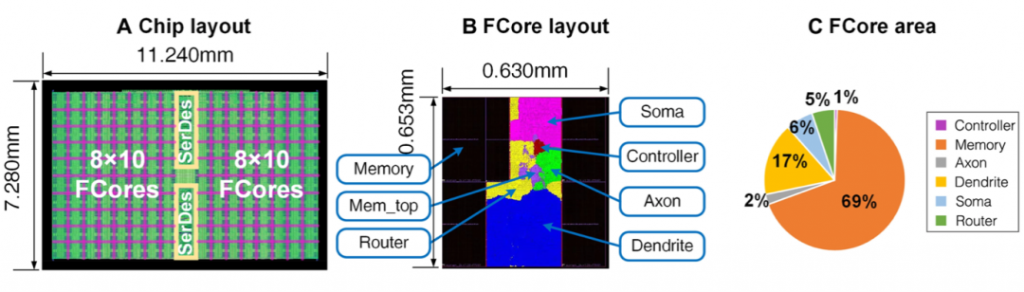
TianjicX芯片采用联电28nm高性能紧凑型(HPC+)CMOS工艺、FBGA-225封装。该芯片包括160个FCore和1个用于芯片间通信的高速序列化/反序列化(SerDes)接口。控制器只占用FCore大约1%的面积,但显著提高了任务执行和交互的灵活性和效率。核心内存模块由5个静态随机访问内存(SRAM)块组成,总容量为144千字节。通过高位宽并行读写接入接口,整个芯片在400MHz时钟频率下内存接入带宽可达5.12tb/s。实验结果显示,与NVIDIA Jetson TX2相比,在TianjicX上跑多个网络的延迟大幅减少了约98.74%,动态功率降低了50.66%。
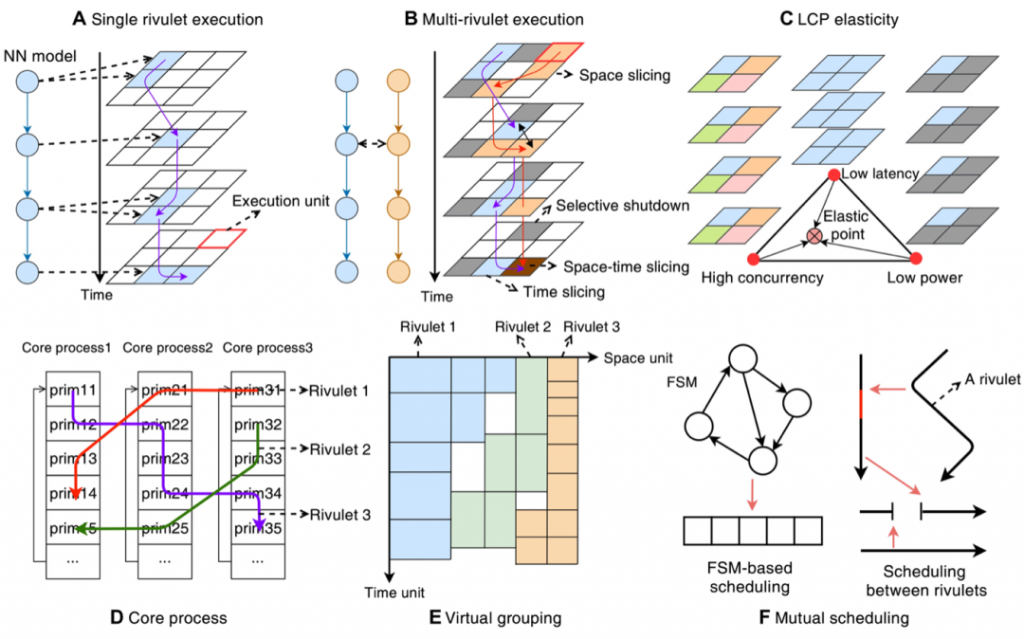
设计Rivulet执行模型和TianjicX芯片的实现,并在设计TianjicX时,就任务执行、资源分配和任务协作方面进行了多种权衡,以实现较高的时空弹性。相较传统的神经拟态芯片,TianjicX能充分利用智能算法的数据局域性,提高内存利用率,支持多种数据移动模式,增强可编程性。TianjicX为移动智能机器人计算硬件的研发开辟了一条新的道路,使其能在低延迟、低功耗的情况下本地执行密集和复杂的任务,并支持多个跨计算范式神经网络模型以各种协调方式在机器人中并行执行。
成果发表于2022年6月《科学·机器人》,被AAAS News作为Highlight研究成果报道。“Neuromorphic computing chip with spatiotemporal elasticity for multi-intelligent-tasking robots”,Ma, Songchen; Pei, Jing; Zhang, Weihao; Wang, Guanrui; Feng, Dahu; Yu, Fangwen; Song, Chenhang; Qu, Huanyu; Ma, Cheng; Lu, Mingsheng; Liu, Faqiang; Zhou, Wenhao; Wu, Yujie; Lin, Yihan; Li, Hongyi; Wang, Taoyi; Song, Jiuru; Liu, Xue; Li, Guoqi; Zhao, Rong; Shi, Luping,SCIENCE ROBOTICS(影响因子:27.541),2022,7,67